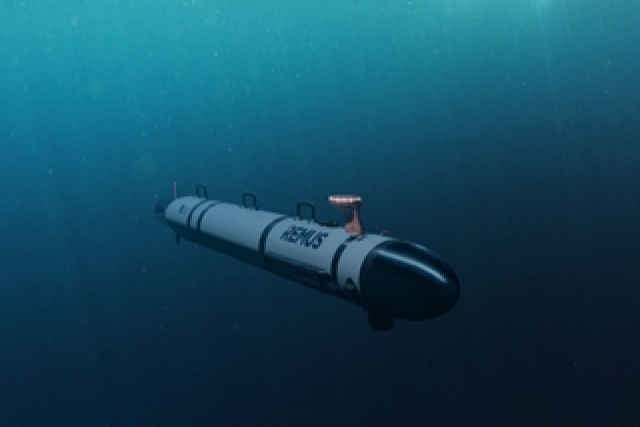
Leidos to Design Medium Undersea Unmanned Vehicle

The U.S. Navy awarded Leidos $12 million for the design of the Medium Unmanned Undersea Vehicle.
In May 2020, the Navy released request for proposal (RFP) for the design, development, test and production for a Medium Unmanned Underwater Vehicle (MUUV).
The service presently uses the 150-pound small Mk 18 Mod 1 Swordfish and 600-pound medium Mk 18 Mod 2 Kingfish UUV to find mine-like objects in the water. Crews launch and recover the tube-shaped UUV from rigid-hull inflatable boats using a small handling system, and the UUV searches the waters and sends information back to a post-mission analysis cell ashore.
The submarine community has been developing a Razorback UUV that was initially meant to be launched and recovered via a submarine’s dry deck shelter and would carry environment-sensing payloads. The Navy determined it also wanted a Razorback variant that could be launched and recovered from a submarine’s torpedo tube, USNI News reports.
The MUUV will ultimately cover the Kingfish’s surface-launched mine countermeasures capabilities and the Razorback’s torpedo tube-launched battlespace-sensing capabilities only – it will not include the dry deck shelter configuration, according to a Naval Sea Systems Command news release.
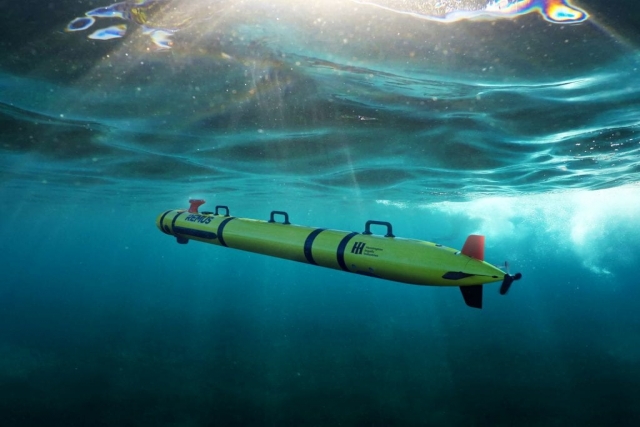
There are two other similar projects launched by the Navy – to develop Lionfish small UUV and Viperfish medium UUV. Two existing vehicles — L3Harris Technologies′ Iver 4 and Huntington Ingalls Industries’ Remus 300 — are being considered for the program.
The Razorback and the Mk 18 Mod 2 could merge into a single program called Viperfish because both are based off the Remus 600 UUV design.
Capt. Dan Malatesta, the program manager for expeditionary missions within the Program Executive Office for Unmanned and Small Combatants was quoted as saying by Defense News that the Navy is working closely with the ExMCM operators to understand the upgrades they need for their current Mk 18 Mod 2s. These include better sonars and cameras for clearer pictures of potential threats in the water, automatic target recognition aides, autonomy software so the UUV can decide to circle back around to a potential item of interest and provide additional imagery for processing.

Boeing-HII Orca XLUUV Submersible to Enter Trials
U.S. Navy Picks HII’s REMUS 300 As Next Gen Small UUV

U.S. Naval Research Lab to Design UUVs with ‘Shark Skin-Like Surfaces’
Huntington Ingalls Launches REMUS 300 UUV

Korean Hanwha’s Chunmoo Missiles to be Launched from Thales’ X-Fire Launchers

Russian Helicopters to Supply Iran with 12 Mi-171 Helicopters

No MiG-29 Jets to Ukraine Until Kyiv Transfers Drone Tech to Poland

Three Ships Sail Past U.S. Naval Blockade, Iran Claims

One Month Since U.S., Israeli War Against Iran: Who Is Gaining?
One month after the United States and Israel launched coordinated strikes on Iran on February 28 the conflict has expanded...

Modern Tank Showdown: T-90MS, Leopard 2A7, M1E3 Abrams Compared
Main Battle Tanks (MBTs) have shown their mettle in recent conflicts such as in Ukraine despite being increasingly vulnerable to...

European Nations Prioritizing Europe-made IRIS-T & SAMP-T over American Patriot Air Defense Systems?
European nations looking to procure new air defense systems appear to be giving the much-vaunted American Patriot a miss in...

Russian T-90MS Crew Discuss Future Upgrades
Defense Mirror spoke with the crew members of the Russian T-90MS main battle tank, produced by UralVagonZavod

China's Mass-produced J-35A Aircraft Set to Disrupt Global Stealth Fighter Market
China is aiming to disrupt the global stealth fighter market by mass-producing its fifth-generation J-35A at a pace comparable to...

The Future of Combat: Miniaturized Laser Weapons Set to Replace Bullets and Missiles
Lasers may soon replace bullets, and drones could disable enemy UAVs with beams of light instead of missiles